
3.1 solid geometry
In a 3-dimensional world we have to consider 3-dimensional coordinate geometry rather than 2-dimensional.
First of all we set up a set of 3 mutually orthogonal coordinate axes, usually labeled , and , see Fig. 3.1 .
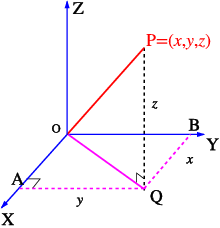
The of axis is called right-handed, using the cork-screw rule: when rotating from to the -axis is in the up direction. We can specify any point by its coordinates . From 2D geometry we know that . Thus
If we call, as is conventional, , then
This work is a UK OER project as part of the Skills for Scientists project. Please contact Niels Walet for more information
 This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 2.0 Generic License
This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 2.0 Generic License