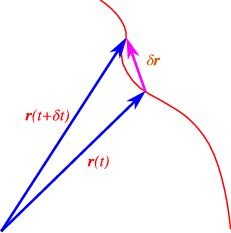
Figure 4.4: A schematic representation of the derivative of a vector function.
In physical (especially mechanics) problems we often have solutions in a form r = r(t), a “vector function”.
Example 4.12:
A particle moves along a circle with uniform angular frequency, r = i\mathop{cos}\nolimits (ωt) + j\mathop{sin}\nolimits (ωt). Find the velocity.
Solution:
If we are perfectly naive, we write v =\dot{ r} = −iω\mathop{sin}\nolimits (ωt) + jω\mathop{cos}\nolimits (ωt). This is actually correct!
The velocity is defined as the vector with as components the time-derivative of the components of the position vector,
|
\class{boxed}{ v =\dot{ x}i +\dot{ y}j +\dot{ z}k. }
|
It is actually quite illustrative to look at a graphical representation of the procedure, see Fig. ??. We notice there that the (vector) derivative of a vector function points is a vector that is tangent to (describes the local direction of) the curve: not a surprise since that is what velocity is!
Example 4.13:
When a particle moves in a circle, find two independent way to show that r ⋅\dot{r} = 0.
Solution:
1) Use the uniform motion example from above, and we find
r ⋅v = −ω\mathop{cos}\nolimits (ωt)\mathop{sin}\nolimits (ωt) + ω\mathop{sin}\nolimits (ωt)\mathop{cos}\nolimits (ωt) = 0.
This is not a general answer though!
2) Write r ⋅r = \text{constant}.
(Definition of circle!) Then, by differentiating both sides of the relation (in the “other” order), we
find
and we have the desired results.
Example 4.14:
Find the velocity of a particle that moves from {r}_{1} = (1,2,3) to {r}_{2} = (3,6,7) in 2\text{ s} along a straight line with constant velocity. Also find the position 5\text{ s} after passing {r}_{1},
Solution:
Clearly r ={ r}_{1} + vt if the particle is at point 1 at t = 0, We get, substituting t = 2;
|
(3,6,7) = (1,2,3) + v2,
|
from which we conclude (solving for each component separately) that v = (1,2,2). At time t = 5 we have
|
r = (1,2,3) + (1,2,2)5 = (6,12,13).
|
Things get slightly more involved (but quite relevant!) when we look at curves in polar coordinates, i.e., specified by r(t) and θ(t). From r = r\mathop{cos}\nolimits (θ)i + r\mathop{sin}\nolimits (θ)j we find that
The first unit vector is indeed the one parallel to r; the second one is defined from its expression. There is some interesting mathematics going on over here,
|
\hat{r}⋅\hat{θ} = (\mathop{cos}\nolimits θi +\mathop{ sin}\nolimits θj) ⋅ (−\mathop{sin}\nolimits θi +\mathop{ cos}\nolimits θj) = 0!
|
This is often used to say that r and θ are orthogonal coordinates, at each point they are associated with different, but always orthogonal directions!
Example 4.15:
Express the velocity of a particle moving in an elliptic (Kepler) orbit,
in turn of \dot{θ}. Now calculate the kinetic energy of the particle.
Solution:
Obviously r = {\mathop{cos}\nolimits θ\over 1−{1\over 2}\mathop{ cos}\nolimits (θ)}i + {\mathop{sin}\nolimits θ\over 1−{1\over 2}\mathop{ cos}\nolimits (θ)}j. Now differentiate w.r.t. t using the chain and quotient rules:
The kinetic energy is thus found to be