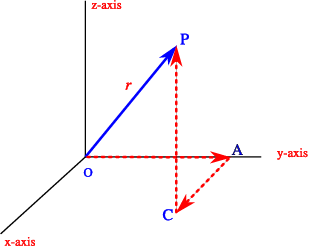
Figure 3.11: Components of a vector in two dimensions.
We look at a general vector r =\overrightarrow{ OA} +\overrightarrow{ OB} =\overrightarrow{ OA} +\overrightarrow{ AC}, see Fig. 3.11, which is decomposed into the sum of two vectors along the x and y axes. We define i as a unit vector in the x-direction, and j as a unit vector in y-direction. So \overrightarrow{OA} = xi, \overrightarrow{OB} = yj. Thus
|
r = xi + yj,\qquad |r| = \sqrt{({x}^{2 } + {y}^{2 } )},
|
where x and y are the components of r in the x and y directions. The vecor r as represented by the vector \overrightarrow{OB} is called a coordinate vector.
As shown in Fig. 3.12, the result in three dimensions is quite similar. Let i, j, k be the right-handed set of unit vectors in the x,y,z direction, respectively. [A set of vectors is called right-handed if, when turning a corkscrew from the first to the second vector, it moves in the direction of the third.] Thus
where x, y and z are the components of r.
We shall often use the notation ({p}_{1},{p}_{2},{p}_{3}) for a vector p = {p}_{1}i + {p}_{2}j = {p}_{3}k. Once again the vectors r and p were given as position vectors, the displacement vector for the point P starting from the origin. Using pythagoras’ theorem repeatedly we see that {r}^{2} = {x}^{2} + {y}^{2} + {z}^{2}, and thus |r| = \sqrt{{x}^{2 } + {y}^{2 } + {z}^{2}}.
Let
then
(please verify these geometrically for 2 dimensional space)
Example 3.1:
Given the points A = (1,−4,2) and B = (2,2,−3), find the component from for the vector \overrightarrow{AB}.
Solution:
We realise that \overrightarrow{OB} =\overrightarrow{ OA} +\overrightarrow{ AB}, or, \overrightarrow{OB} −\overrightarrow{ OA} =\overrightarrow{ AB}. We thus find that \overrightarrow{AB} = (i− 4j + 2k) − (2i− 2j −k) = (1 − 2)i + (−4 + 2)j + (2 + 1)k = −i + 2j + 3k.
We study \overrightarrow{OP} = r = xi + yj + zk or r = (x,y,z), |r| = r.Then the unit vector in the direction of r is
|
\hat{r} = r∕r = x∕ri + y∕rj + z∕rk,
|
Clearly |\hat{r}| = {{x}^{2}+{y}^{2}+{z}^{2}\over {r}^{2}} = 1.
Example 3.2:
If r = 8i + 4j −k find r, \hat{r} and the direction cosines (dc’s) of r.
Solution:
|
r = |r| = \sqrt{{8}^{2 } + {4}^{2 } + {(−1)}^{2}} = \sqrt{81} = 9\quad ,
|
|
\hat{r} = r∕r = 8∕9i + 4∕9j − 1∕9k\quad .
|
The d.c’s are the components of \hat{r}, i.e., l = 8∕9, m = 4∕9, n = −1∕9.
If a = {a}_{1}i + {a}_{2}j + {a}_{3}k , and b = {b}_{1}i + {b}_{2}j + {b}_{3}k, and λ and μ are scalars, then
|
λa + μb = (λ{a}_{1} + μ{b}_{1})i + (λ{a}_{2} + μ{b}_{2})j + (λ{a}_{3} + μ{b}_{3})k\quad .
|
Example 3.3:
If a = 2i− 7j + k , b = 3i + 2j − 5k, find (i) 2a, (ii) − 3b, (iii) 3a−b, and (iv) the unit vector in the direction ofa.
Solution:
(i) 2a = 4i− 14j + 2k, (ii) − 3b = −9i− 6j + 15k, (iii) 3a−b = 6i− 21j + 3k − (3i + 2j − 5k) = 3i− 23j + 8k, (iv) \hat{a} = {a\over a} = {2i−7j+k\over \sqrt{(4+49+1)}} = {1\over \sqrt{54}}(2i− 7j + k)
Example 3.4:
Given the points A = (5,−2,3)
and B = (2,1,−2)
find: (i) The position vectors of A and B relative to the origin
(ii) the vector \overrightarrow{AB},
(iii) the position vector of the mid-point P
of AB.
Solution:
(i) \overrightarrow{OA} = a = 5i− 2j + 3k,
\overrightarrow{OB} = b = 2i + j − 2k.
(ii) \overrightarrow{OA} +\overrightarrow{ AB} =\overrightarrow{ OB}
or \overrightarrow{AB} =\overrightarrow{ OB} −\overrightarrow{ OA} = b−a = −3i + 3j − 5k
(iii) \overrightarrow{OP} =\overrightarrow{ OA} +\overrightarrow{ AP} = a + {1\over
2}\overrightarrow{AB} = {1\over
2}(a + b) = {7\over
2}i−{1\over
2}j + {1\over
2}k
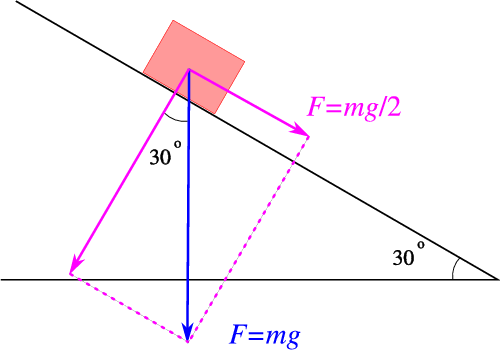
Example 3.5:
A truck of mass 10000 kg stands on a slope that makes and angle of 30∘
with the horizontal.
1) Find the acceleration of the truck in terms of g.
2) An explosion exerts a force 1{0}^{5}\text{ N}
orthogonal to the surface. Find the resultant force (use g = 10\text{m}∕{\text{s}}^{2}).
Solution:
1) Look at Fig. 3.13. We see that the force parallel to the plane is {1\over
2}mg,
orthogonal {1\over
2}\sqrt{3}mg.
The acceleration is thus {1\over
2}g.
2) The new force, choosing the x
axis parallel to the slope, and y
orthogonal (upwards), is (1{0}^{5} −{1\over
2}\sqrt{3}1{0}^{5})j + 5 × 1{0}^{4}i = 13397.5j + 5 × 1{0}^{4}i.
This has size 51763.8\text{ N},
and makes an angle of 15∘
with the slope, so 45∘
with the horizontal.