
To be used in future
Prev Section 3.1: Why symmetries?
Up Chapter 3: Symmetries
Section 3.3: Consequences for Quantum Mechanics Next
3.2 Examples of Symmetries
\textbookShankar, chapter 2
Let us build up our symmetries slowly. At this point I shall concentrate loosely on space-time symmetries; many of these have an internal counterpart as well--think of the total angular momentum as the sum of spin and orbital angular momentum; spin rotates as space is rotated, but spin is not part of normal space-time. We shall not analyse this now, and we shall also not discuss internal symmetries without an external partner (isospin/flavour, QCD colour, ...).
For space-time symmetries, we can specify the change in either of two ways: as a change in coordinates and time (equivalent to position and velocity), or as a change in coordinates and momentum (realising we can relate a change in space-time to a change in
by
). This subtle distinction has mathematical implications I am also not going to discuss here; they are linked to the difference between a space, its tangent space, and something called a co-tangent space. If you are really interested, the mathematical term to search for is the “co-tangent bundle”↓ in differential topology.
3.2.1 Translational invariance↓
A very important symmetry in physics is translational invariance: If it does not matter where you choose the origin of space, the physics must be invariant. Since moving the origin is a translation, we find that translations are a symmetry of most microscopic systems.
For a classical point particle, whose state of motion is specified by
and
, the way to represent a change of origin from
to
is by the transformation
while
remains unchanged. We conclude that
is also unchanged. We shall require the laws of physics to be invariant under the transformation
for a translationally invariant problem. We use the fact that the object describing the dynamics of a point particle completely is the Hamiltonian,
For a translationally invariant particle, the Hamiltonian must thus be the same, independent of translation. The kinetic energy is invariant since momentum is unchanged, but the external potential must satisfy
i.e., the potential is a constant, which we may well choose zero. Thus we can have no external forces when we have translational invariance!
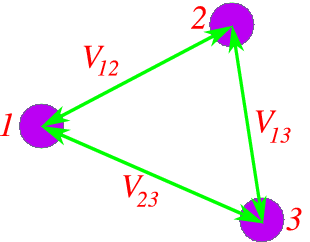
The situation is slightly more interesting for a system of two particles. We still can have no external forces, but we can now have internal ones. We find that the most general form compatible with translational symmetry is
This readily generalises to many particle systems with two-body forces, as suggested in Fig. 3.1↑.
3.2.1.1 Time translations↓
A related symmetry is that under time translations: “clearly” physics is independent of the choice of the origin of time. This corresponds to invariance of the dynamics under the transformation
This symmetry does not lead to new conditions: the invariance is already manifest in the fact that our Hamiltonian is chosen an instantaneous function of time—we have assumed that the dynamics only depends on position and velocity at the current time, rather than the full history of the particle’s trajectory. In other words, the fact that we use the Hamiltonian formalism already implies that we have time-translational invariance,
We can write down more general structures for the case there is no time-translational invariance, but these lead to substantial complications, and will not be pursued here.↓
3.2.2 Rotational invariance↓
This symmetry is more complicated, but equally important for microscopic physics. The principle of rotational invariance states that one can choose the orientation of an inertial coordinate system without changing the laws of physics. In other words, we can rotate our axes any way we want!
The way to represent the transformation is
where
is the
rotation matrix, and the vector
contains three rotation angles, which we can think of as describing rotations along the
,
and
axes, respectively. Alternatively, and this conceptually much simpler if multiple angles are non-zero, it is possible to interpret
, the length of
, as the rotational angle, and
, the unit vector parallel to
, as the rotation axis. Even though this is a perfectly correct and sensible choice, there are some practical issues with this parametrisation, and we usually use the Euler angles, discussed later on (Sec. 3.4.5.1↓).↓
3.2.3 Galilean invariance↓
Invariance under the most general combinations of the three transformations above (translations in space and time and rotations) is usually referred to as “Galilean invariance”. This is the largest group [B] [B] In the mathematical sense of a group of transformations, see the first example sheet. of continuous space-time symmetries of the laws of Newtonian mechanics, and can be described by the general expression
↓
3.2.4 ↓Discrete symmetries
There are two additional basic discrete symmetries of the classical laws of physics. the word “discrete” means that there are a finite number of symmetry transformations. In the cases studied here there is just one interesting transformation: performing the transformation twice is the same as the identity operation, i.e., we are back where we started from.
3.2.4.1 Space inversion↓/parity↓
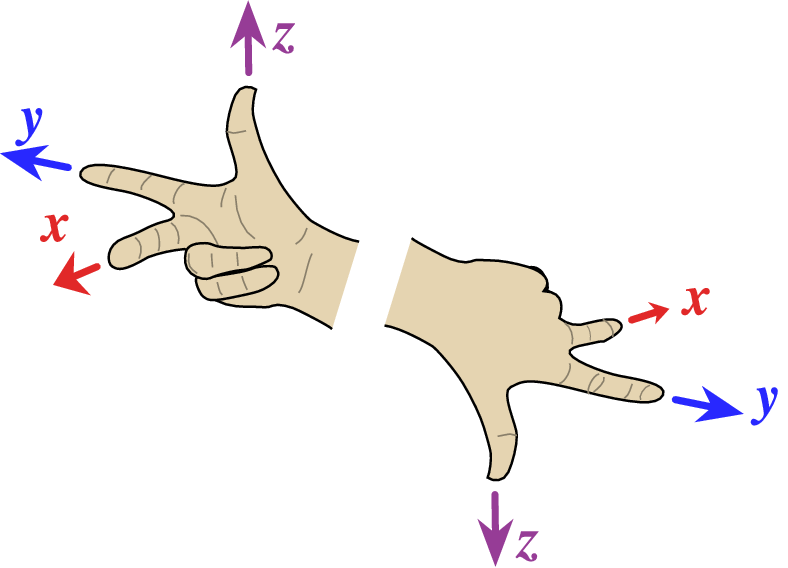
Space reflections are defined by the transformations
As can be seen from Fig. 3.2↑, this turns a right-handed set coordinates into a left-handed one. The invariance of physics under such transformations is a statement about the arbitrariness of choosing a left or right-handed coordinate system. As you may already know, this symmetry is broken in the theory of weak interactions, but preserved in all other known theories.
3.2.4.2 Time reversal↓
Another symmetry in this class is the reversal of the “arrow of time”: it states that if we record the motion of particle in a video, and let the video run backwards, the observed motion is still satisfies all the laws of physics.
Using the standard relation between velocities and momentum, the instantaneous effect--the effect at a fixed point in time--is to transform
3.2.4.3 Space inversion without momentum inversion
You could think that there is a third option corresponding to
You would be right, but this is not an independent symmetry, since we can get this result by a combination of space inversion and time reversal.
3.2.5 Lorentz and Poincaré invariance↓↓
If we look at relativistic mechanics, we best adopt the four vector notation [C] [C] We use a wiggle under an object to denote a 4-vector of this type.
and define the vector norm in the peculiar way that suits general relativity, [D] [D] Or use the alternative definition
that is less frequently used. See, e.g., Ref. [4].
This is zero when a point lies on the light cone through the origin, negative for a space-like separation, and positive for the time-like case.
Symmetries under spatial translation and rotation still hold, but you know the complications of changing to a moving (inertial) coordinate frame (see the next section). The basic conservation law is no longer for the Hamiltonian (energy) and momentum separately, but can be expressed as covariance (see below) of the 4-momentum
3.2.5.1 Boosts↓
One of the most fundamental new operations is the transformation from one inertial coordinate frame to another moving with constant velocity
is most easily found for a transformation along a coordinate axis. From the transformations (with
,
)
we find the matrix expression for such a “Lorentz boost” is
usually written as
where in the last line we used the “up-down” index convention attributed to Einstein that is common to relativity. In this case, one actually drops the summation sign: any repeated index, appearing once as subscript and once as a superscript is summed over all possible values. It is not very hard to generalise this to a boost in an arbitrary direction, see the example sheet. For the case discussed above, we find that
This suggests we can parametrise
and
and thus a boost corresponds to a rotation over an imaginary angle
in the
(i.e.,
) plane.
Since the momentum is not invariant, neither is energy! But we can find the new energy and momentum from the same Lorentz transformation,
An object that transforms like a 4-vector with lower indices under a Lorentz transformation is usually called covariant↓.
3.2.5.2 Full Lorentz symmetry
Full Lorentz symmetry is the set of all relativistic symmetry transformations that leave the origin of space-time invariant, and can be shown to consist of a combination of all boosts and all coordinate rotations. Additional aspects of this will be debated when we look at relativistic wave equations in Chap. 6↓.
3.2.5.3 Poincaré invariance
We speak of Poincaré invariance if we add space and time translations to the Lorentz transformation. There are sound mathematical reasons to deal with the Lorentz symmetries and Poincaré symmetries separately, which will not be debated here.↓↓
3.2.6 Active and passive view of transformations↓↓
In our expressions above we have tacitly taken a mixture of the a”active view ” and the “passive view” of transformations. That means for translations we have transformed space (moving the origin, etc.) leaving the vector
invariant, which is linked closely to the standard verbal description of symmetries: we transform the coordinate axes leaving the vector
pointing as it was before. For rotations we have not yet given enough detail to make out what we are doing, but for boosts we have taken the alternative “active view” where we change
, leaving the origin invariant. A little thought shows that these two approaches are inverse; i.e., an active transformation is always the inverse of the corresponding passive one. From here on we shall carefully use active transformations! The two views are obviously equivalent...
This work is a Open Educational Resource. Please contact Niels Walet for more information, or further licensing.
 This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 3.0 Generic License
This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 3.0 Generic License