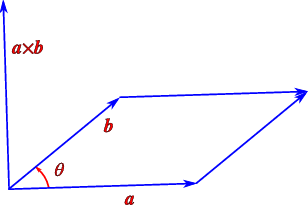
Figure 3.15: The definition of the outer product.
We have now looked extensively at the scalar product, and now look at the vector product, that returns a vector. Two standard notations are used
|
a×b,\text{and }a\hat{\ }b.
| (3.2) |
We shall use the first notation. Other terms used are “cross product” or “outer product”.
The vector product of two vectors a and b is defined as a vector, see Fig. 3.15,
The magnitude of the outer product is exactly equal to the area of the parallelogram with sides a and b, A = ab\mathop{sin}\nolimits θ. calculation of the outer product in component form (to be discussed below) is thus an easy way to obtain this area.
Let n be a unit vector in the direction of a×b, then a×b = ab\mathop{sin}\nolimits θn. From the right handed rule we see that b×a = ab\mathop{sin}\nolimits θ(−n) = −a×b, i.e., the vector product is not commutative. Properties of the outer product:
This last line is often summarized in the form of a determinant
Example 3.10:
Give a = (6,1,3) and b = (−2,0,4), find a×b.
Solution:
Example 3.11:
Find a×b
given a = i + 2j −k, and
b = 2i−j + k ,and find
\hat{n} the unit vector
perpendicular to a
and b.
|
a×b =\mathop{ det}\left (\array{
i& 1 & 2\cr
j& 2 &−1
\cr
k&−1& 1} \right ).
|
Expand by Row 1: and we get i(2 − 1) −j(1 + 2) + k(−1 − 4) = i− 3j − 5k.
Other examples: